Paper Reading: Robot learning 2
I want to stand with them.
RL-BASED DRONE PAPER READING
Planar Pose Graph#
A stability framework for planar pose optimization
A stability framework for planar pose optimization. By decoupling the problem into two subproblems and analyzing them, it converts the original matrix-form problem into a linear one (simpler than the matrix formulation), and finally optimizes the target by solving the linear problem.
Whole-Body Scale Optimization#
Accurate whole-body collision trajectory prediction with linear scaling
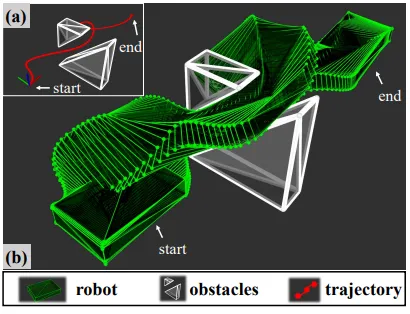 It proposes an accurate whole-body collision formulation with linear scaling, and derives analytic gradients for trajectory optimization.
It proposes an accurate whole-body collision formulation with linear scaling, and derives analytic gradients for trajectory optimization.
UAV Payload Transportation#
Planning and control for complex structures
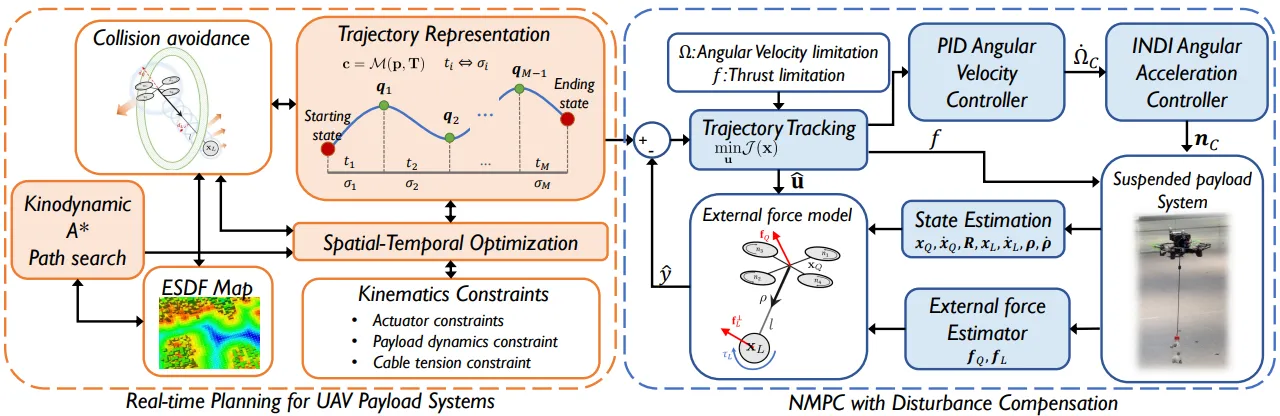 Control of the UAV attitude and the payload attitude during heavy-load transportation, enabling automatic swing suppression.
Control of the UAV attitude and the payload attitude during heavy-load transportation, enabling automatic swing suppression.
Robotic Relative Localization#
Swarm localization
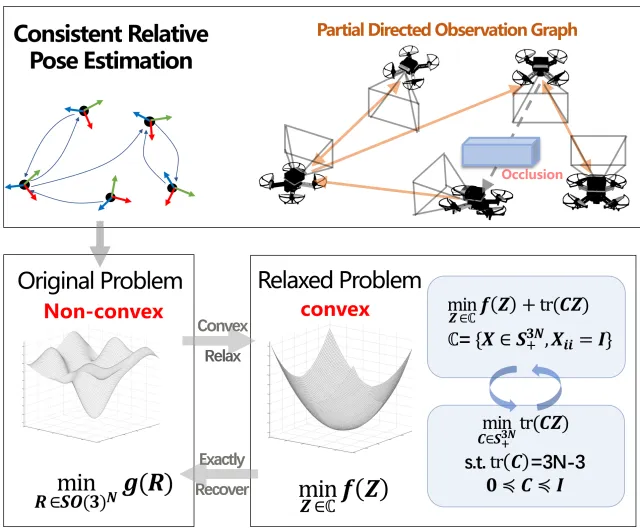 Relative localization for a robot swarm with mutual observations. It addresses recovering relative poses for partially mutually observed robot groups and proposes a robust, scalable algorithm.
Relative localization for a robot swarm with mutual observations. It addresses recovering relative poses for partially mutually observed robot groups and proposes a robust, scalable algorithm.
Path Planning#
Path planning
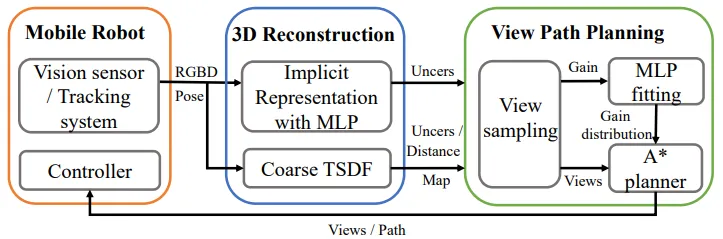 Topic: improve view-path planning efficiency for autonomous implicit reconstruction and enhance reconstruction quality of target images. Methods: (1) approximate information-gain fields (2) hybrid representations (3) a new path-planning strategy.
Topic: improve view-path planning efficiency for autonomous implicit reconstruction and enhance reconstruction quality of target images. Methods: (1) approximate information-gain fields (2) hybrid representations (3) a new path-planning strategy.
GS-Planner#
Gaussian-Splatting-based Planning Framework
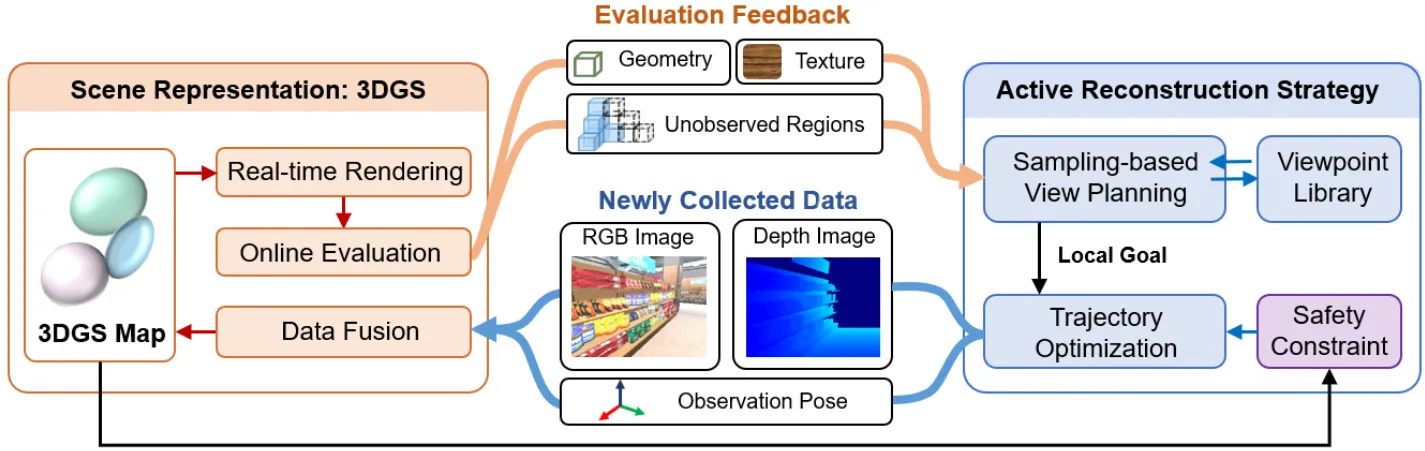 3D Gaussian reconstruction (mapping + path planning, with emphasis on mapping): it proposes complete and mapping-quality evaluation metrics for 3D Gaussian mapping, and designs a sampling-based active view-planning algorithm to guide reconstruction of unobserved regions and improve mapping quality.
3D Gaussian reconstruction (mapping + path planning, with emphasis on mapping): it proposes complete and mapping-quality evaluation metrics for 3D Gaussian mapping, and designs a sampling-based active view-planning algorithm to guide reconstruction of unobserved regions and improve mapping quality.
Back to Newton’s Laws#
Vision-based optimal control
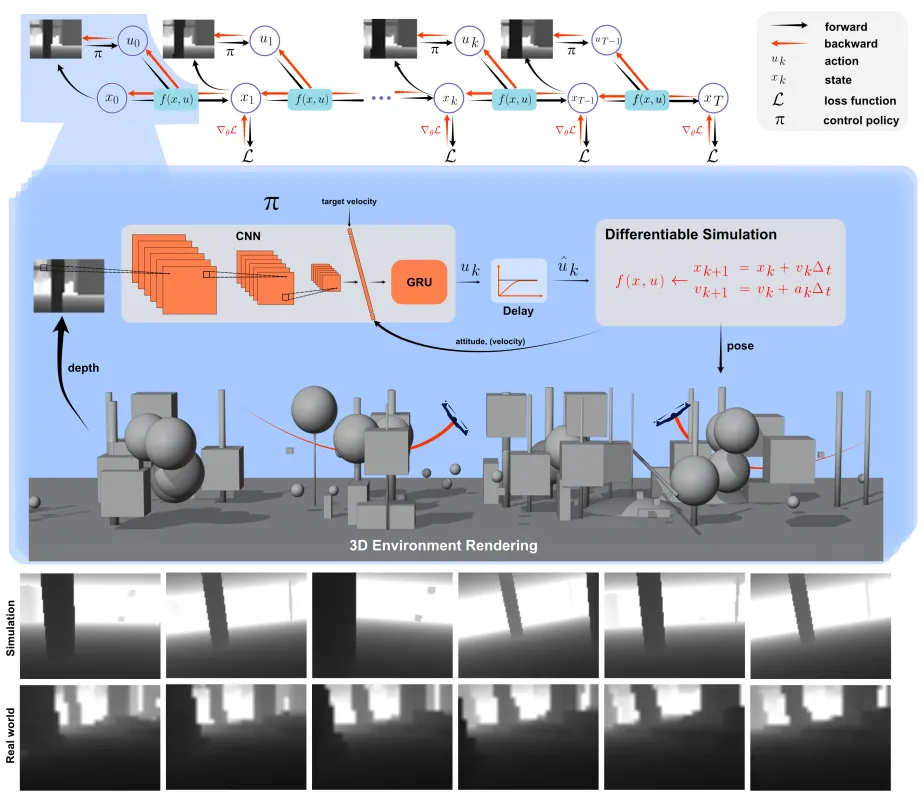 This is not a paper in the reinforcement learning scope. As its title suggests, it goes back to Newton’s laws and uses physical approaches to achieve high-speed UAV flight, still based on vision algorithms.
This is not a paper in the reinforcement learning scope. As its title suggests, it goes back to Newton’s laws and uses physical approaches to achieve high-speed UAV flight, still based on vision algorithms.
ARiADNE#
Attention-based reinforcement learning method
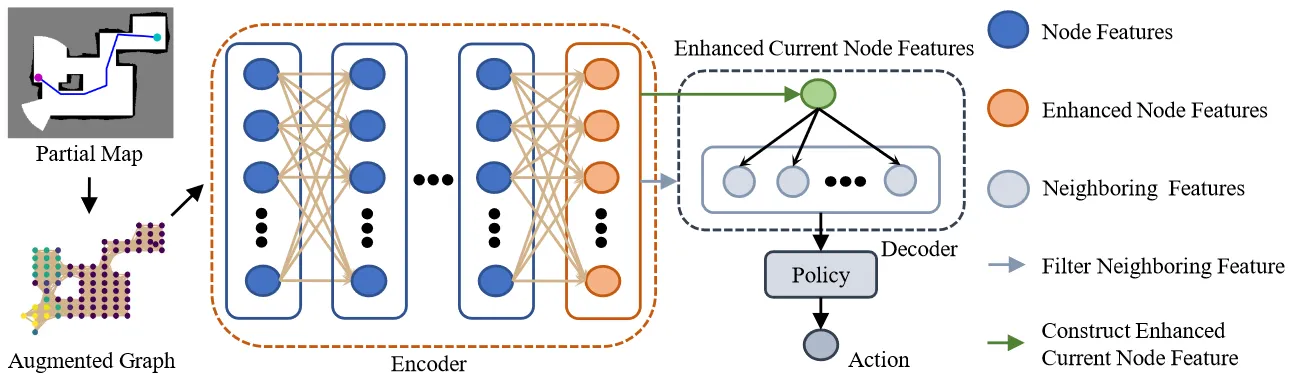 ARiADNE is an attention-based RL method for autonomous exploration in unknown robot environments, addressing short-sighted planning. Key contribution: use an attention network to learn multi-scale spatial dependencies in maps, combined with SAC to achieve non-myopic path decisions. It outperforms frontier-based methods, sampling-based methods, and CNN-DRL baselines in exploration efficiency, and is validated for practicality in ROS simulation.
ARiADNE is an attention-based RL method for autonomous exploration in unknown robot environments, addressing short-sighted planning. Key contribution: use an attention network to learn multi-scale spatial dependencies in maps, combined with SAC to achieve non-myopic path decisions. It outperforms frontier-based methods, sampling-based methods, and CNN-DRL baselines in exploration efficiency, and is validated for practicality in ROS simulation.
CTSAC#
Transformer + SAC with periodic-review curriculum learning and LiDAR clustering optimization
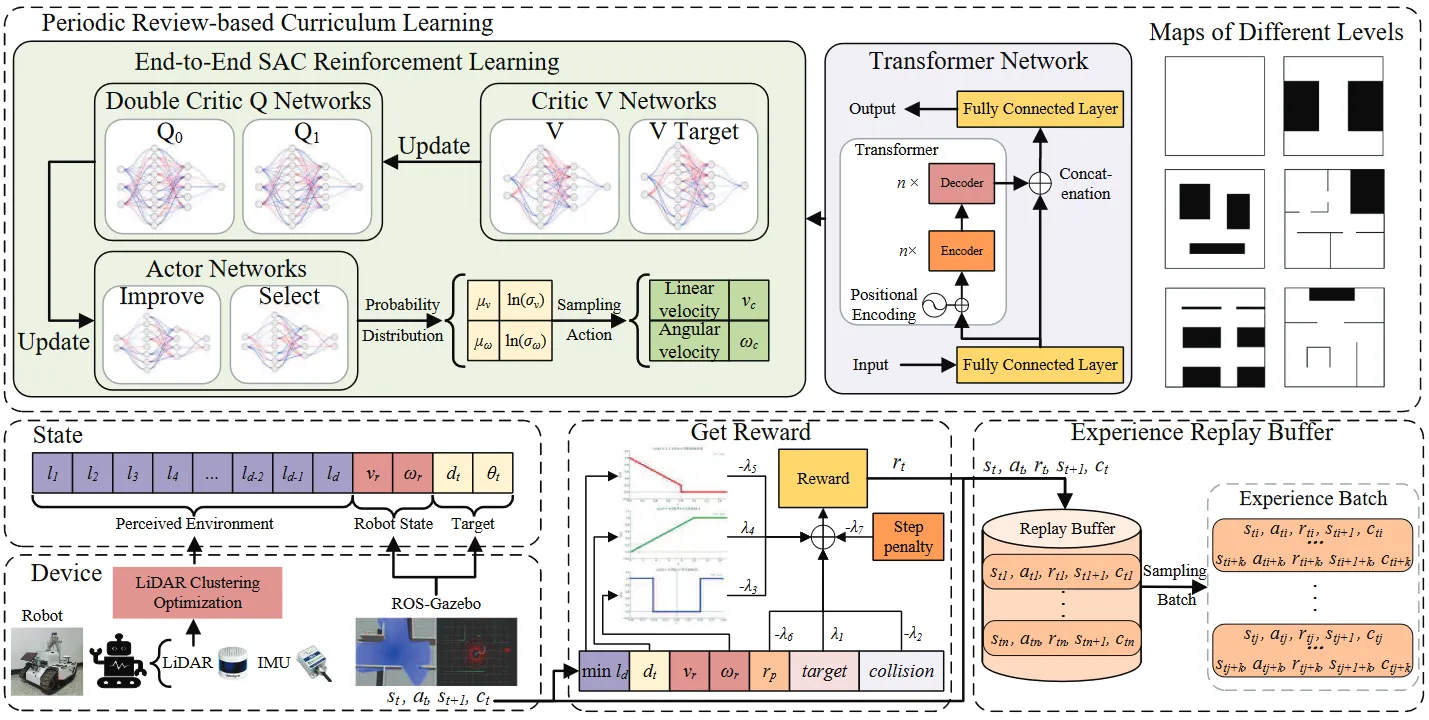 To address weak environment reasoning, slow convergence, and hard sim-to-real transfer in goal-directed autonomous robot exploration, it proposes CTSAC: it embeds a Transformer into the SAC perception network to use history information and improve foresight, designs a periodic-review curriculum learning scheme to mitigate catastrophic forgetting and accelerate training, and optimizes LiDAR clustering to narrow the sim-to-real gap. ROS-Gazebo simulation and real-robot experiments show higher exploration success rate and efficiency than traditional non-learning methods and mainstream learning-based algorithms.
To address weak environment reasoning, slow convergence, and hard sim-to-real transfer in goal-directed autonomous robot exploration, it proposes CTSAC: it embeds a Transformer into the SAC perception network to use history information and improve foresight, designs a periodic-review curriculum learning scheme to mitigate catastrophic forgetting and accelerate training, and optimizes LiDAR clustering to narrow the sim-to-real gap. ROS-Gazebo simulation and real-robot experiments show higher exploration success rate and efficiency than traditional non-learning methods and mainstream learning-based algorithms.
DARE#
Diffusion policy + attention map encoder to generate exploration paths from optimal expert demonstrations
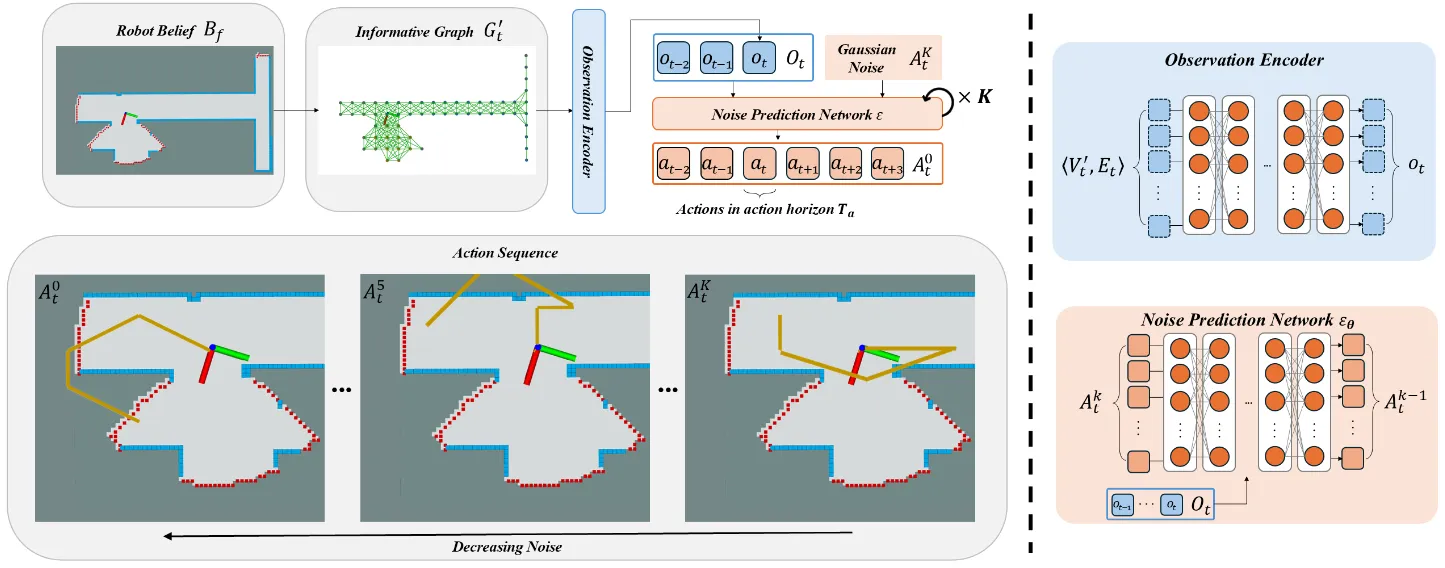 It proposes DARE, a generative method for autonomous robot exploration. It uses an attention encoder to extract environment-map features, and a diffusion-policy network to learn exploration patterns from optimal expert demonstrations. It can infer the structure of unknown regions based on local environment beliefs and generate explicit long-horizon planned paths. Simulation and real-world deployment show exploration efficiency comparable to mainstream traditional and learning-based planners, with strong generalization and sim-to-real transfer.
It proposes DARE, a generative method for autonomous robot exploration. It uses an attention encoder to extract environment-map features, and a diffusion-policy network to learn exploration patterns from optimal expert demonstrations. It can infer the structure of unknown regions based on local environment beliefs and generate explicit long-horizon planned paths. Simulation and real-world deployment show exploration efficiency comparable to mainstream traditional and learning-based planners, with strong generalization and sim-to-real transfer.