
Paper Reading:Robot learning 1
我要和他们站在一起。
RL-BASED DRONE PAPER READING
learning-based 电机故障控制#
learning-based 的无人机电机异常姿态控制
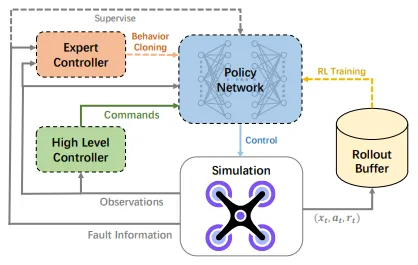 基于RL的控制算法优化,提出一种基于学习的 PFTC 方法,首次将基于学习的方法用于实际四旋翼故障失控验证,与使用先验故障信息的 AFTC 方法相当的性能水平,容错控制方面,引入 Selector-Controller 网络结构合了现有 PFTC 和 AFTC 方法的优势。使用 RL、行为克隆(BC)和带故障信息的监督学习相结合的方式更新 policy 网络。属于强化学习策略网络 + 近端策略优化(PPO)作为 policy + 形成基于学习的被动容错控制(PFTC)方法处理单旋翼故障问题。类似于控制类型的文章,在控制方面可以分为高层控制器和底层控制器,高层控制器可以不做什么修改,用以前较好较为成熟的方案,在底层控制器上可以采用基于学习的策略网络。
基于RL的控制算法优化,提出一种基于学习的 PFTC 方法,首次将基于学习的方法用于实际四旋翼故障失控验证,与使用先验故障信息的 AFTC 方法相当的性能水平,容错控制方面,引入 Selector-Controller 网络结构合了现有 PFTC 和 AFTC 方法的优势。使用 RL、行为克隆(BC)和带故障信息的监督学习相结合的方式更新 policy 网络。属于强化学习策略网络 + 近端策略优化(PPO)作为 policy + 形成基于学习的被动容错控制(PFTC)方法处理单旋翼故障问题。类似于控制类型的文章,在控制方面可以分为高层控制器和底层控制器,高层控制器可以不做什么修改,用以前较好较为成熟的方案,在底层控制器上可以采用基于学习的策略网络。
TACO#
基于目标与指令导向的强化学习(TACO)框架处理不同机动任务并可在线调参
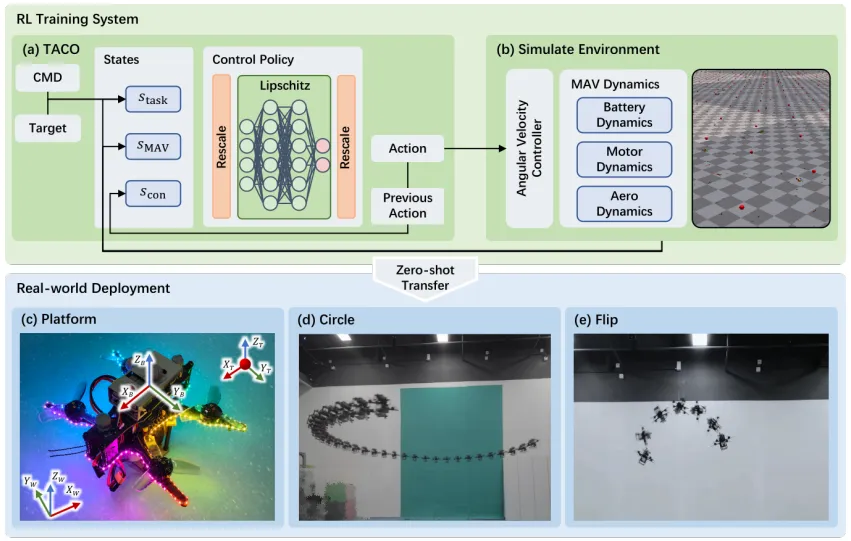 无需预定义机动轨迹,支持在线调整飞行参数。通过统一的状态设计形式,学习不同的特技动作。提高策略的时间和空间平滑性、独立性及对称性,无需复杂的动态模型或奖励函数,以 “零样本” 方式克服 “仿真到现实” 的差距。一种结合输入输出重缩放的谱归一化方法克服 sim to real Gap。
无需预定义机动轨迹,支持在线调整飞行参数。通过统一的状态设计形式,学习不同的特技动作。提高策略的时间和空间平滑性、独立性及对称性,无需复杂的动态模型或奖励函数,以 “零样本” 方式克服 “仿真到现实” 的差距。一种结合输入输出重缩放的谱归一化方法克服 sim to real Gap。
End-to-end Learning Approach#
基于雷达数据和 DRL 的动态环境导航避障算法
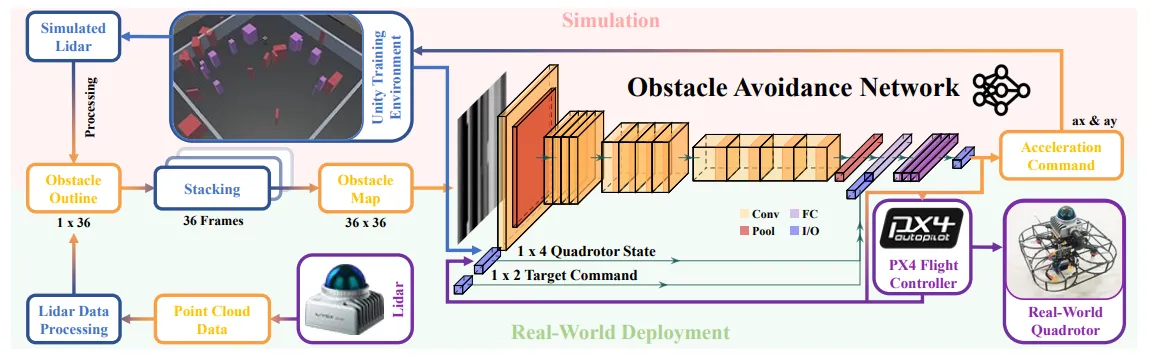 将三维点云数据压缩为二维障碍物图,同时包含静态与动态障碍物的轮廓信息及运动特征。端到端深度神经网络,从障碍物图中提取动态与静态障碍物的运动学信息,最终生成加速度指令发送给四旋翼。流程为基于深度强化学习的方法实现四旋翼在高动态环境中的导航 + 激光雷达(LiDAR)数据编码器 + 端到端深度神经网络。
将三维点云数据压缩为二维障碍物图,同时包含静态与动态障碍物的轮廓信息及运动特征。端到端深度神经网络,从障碍物图中提取动态与静态障碍物的运动学信息,最终生成加速度指令发送给四旋翼。流程为基于深度强化学习的方法实现四旋翼在高动态环境中的导航 + 激光雷达(LiDAR)数据编码器 + 端到端深度神经网络。
LiDAR-based Quadrotor#
集成规划与控制(Integrated Planning and Control, IPC)模块,为无人机实现辅助避障功能
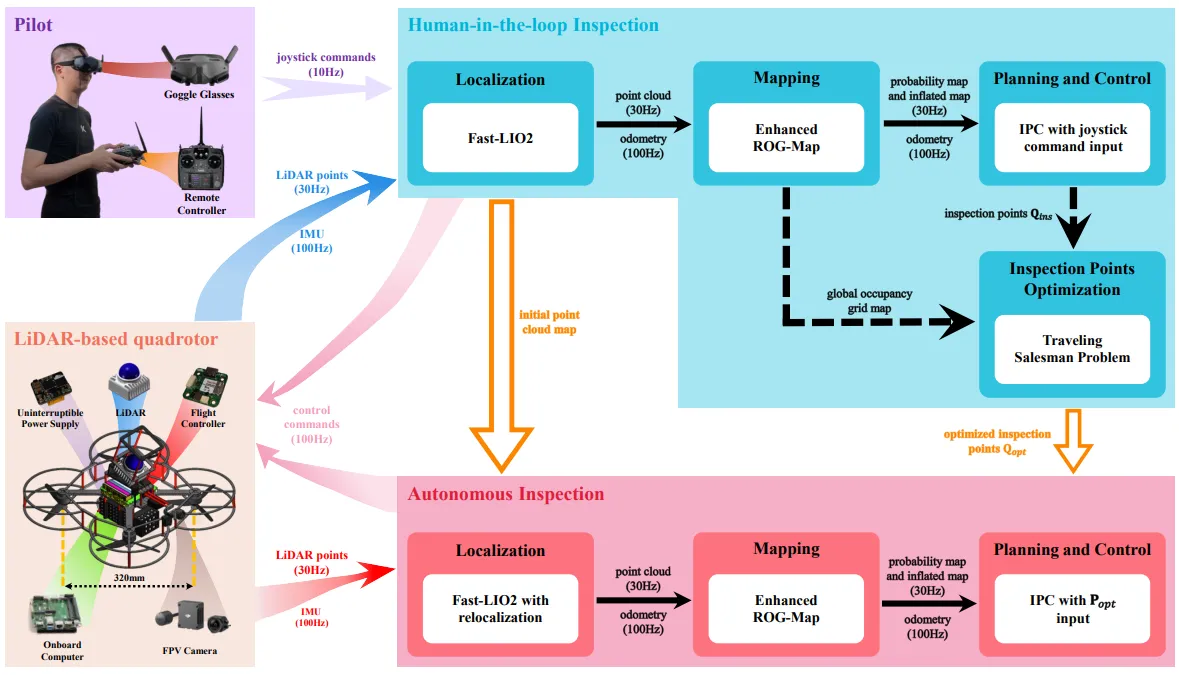 本研究采用集成规划与控制(Integrated Planning and Control, IPC)模块,为无人机实现辅助避障功能,并将适配后的版本命名为 APAS-IPC(基于 IPC 的高级飞行员辅助系统)。其核心是将规划与控制紧密集成到线性模型预测控制(Model Predictive Control, MPC)框架中,能够以 100 Hz 的频率生成最优轨迹及对应的控制指令。最核心的就是APAS-IPC 架构。
本研究采用集成规划与控制(Integrated Planning and Control, IPC)模块,为无人机实现辅助避障功能,并将适配后的版本命名为 APAS-IPC(基于 IPC 的高级飞行员辅助系统)。其核心是将规划与控制紧密集成到线性模型预测控制(Model Predictive Control, MPC)框架中,能够以 100 Hz 的频率生成最优轨迹及对应的控制指令。最核心的就是APAS-IPC 架构。
ROG-Map#
ROG-Map
激光雷达与占据栅格地图的集成(一种基于均匀栅格的占据栅格地图,维护一个随机器人移动的局部地图,实现高效的地图操作并降低大场景自主飞行的内存成本)。提出了一种新颖的增量更新方案,确保在所有情况下都具有O(n)的计算复杂度。提出的方法在公共数据集上将遍历的栅格数量减少了70% ~ 97%,显著加速了障碍物膨胀过程。
STAF-Navi#
基于DRL的无人机导航框架,集成了内部记忆和增强的感知能力
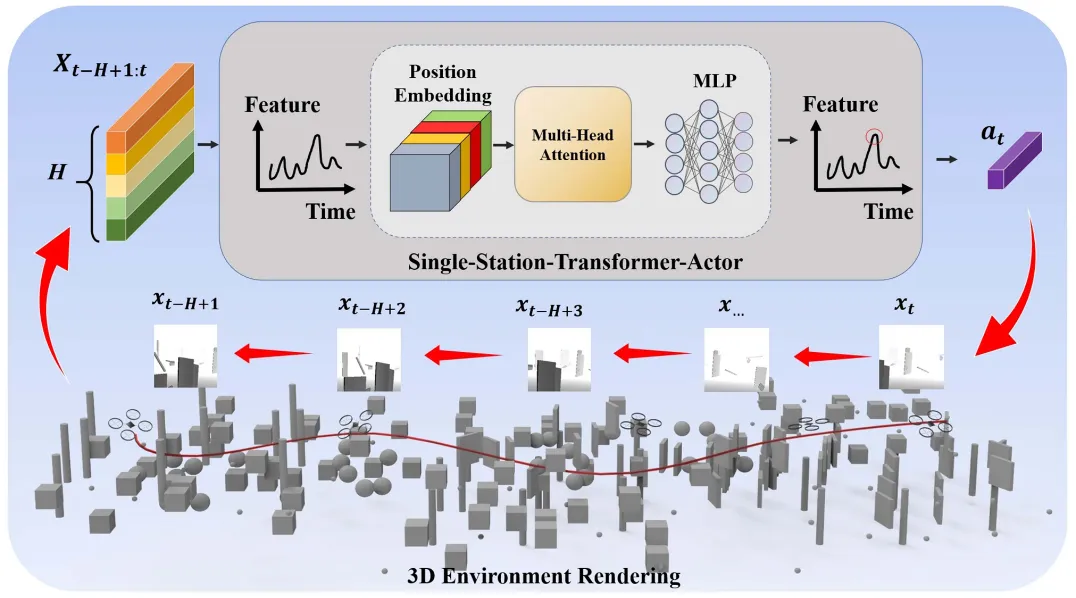 Single-Station-Transformer-Actor (SSTA) model(单站Transformer执行器模型),该模型将位置编码与基于Transformer的注意力机制相结合,以融合随时间变化的深度图像输入和低维状态信息。基于SSTA的执行器(SSTA-based actor)和基于GRU的评价器(GRU-based critic)都处理历史数据,使得智能体能够整合来自过去观测和动作的上下文信息,最终使无人机能够执行需要多步规划和持续反馈的扩展任务。
Single-Station-Transformer-Actor (SSTA) model(单站Transformer执行器模型),该模型将位置编码与基于Transformer的注意力机制相结合,以融合随时间变化的深度图像输入和低维状态信息。基于SSTA的执行器(SSTA-based actor)和基于GRU的评价器(GRU-based critic)都处理历史数据,使得智能体能够整合来自过去观测和动作的上下文信息,最终使无人机能够执行需要多步规划和持续反馈的扩展任务。
Flight in Clutter#
未知杂乱环境的飞行控制框架
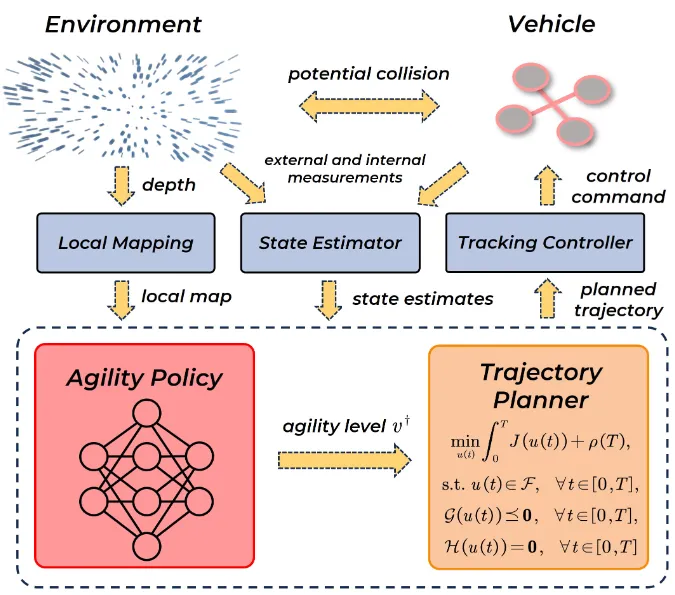 针对未知杂乱环境的飞行器,提出分层学习 - 规划框架,将在线强化学习与基于模型的轨迹生成结合,让飞行器动态调整速度约束;核心贡献是设计两阶段奖励解决早期终止惩罚的稀疏与随机问题,仿真与实机验证该方法在效率、安全性上优于定速方案与 EVA-planner,且具备感知感知能力。
针对未知杂乱环境的飞行器,提出分层学习 - 规划框架,将在线强化学习与基于模型的轨迹生成结合,让飞行器动态调整速度约束;核心贡献是设计两阶段奖励解决早期终止惩罚的稀疏与随机问题,仿真与实机验证该方法在效率、安全性上优于定速方案与 EVA-planner,且具备感知感知能力。
Drone Swarm#
视场受限的视觉无人机集群
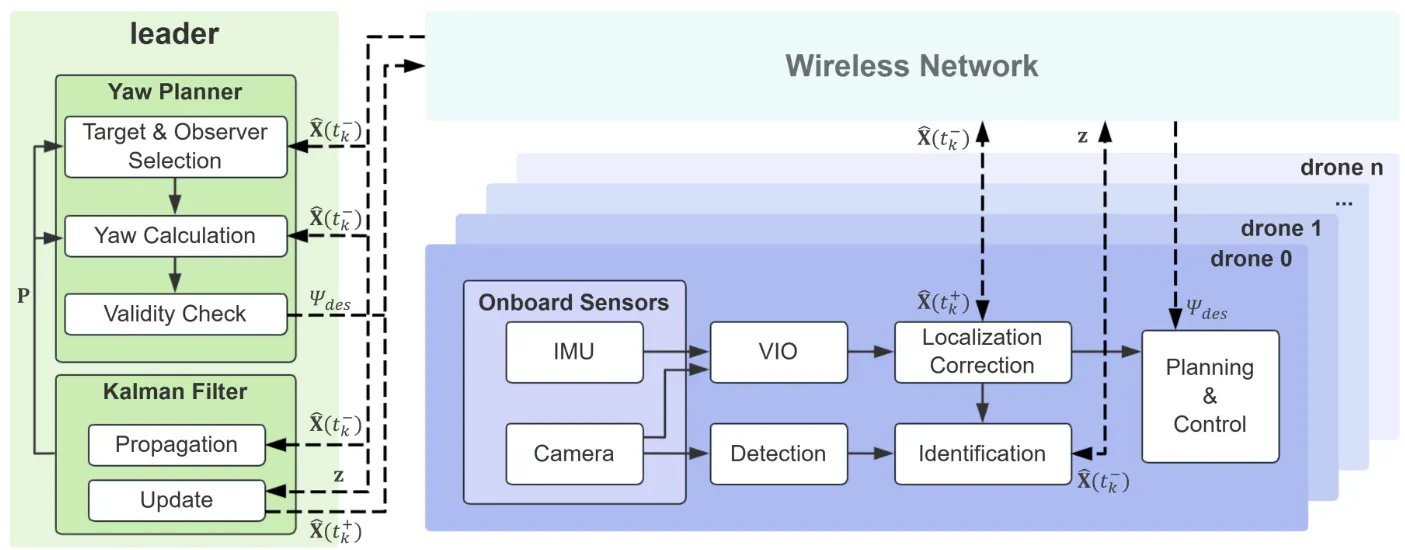 面向视场受限的视觉无人机集群,提出主动定位校正系统,通过偏航规划平衡环境观测与互观测需求;核心贡献是用卡尔曼滤波量化定位不确定性并分配互观测任务,实机可将定位漂移最高降低 65%,在无 GPS 环境稳定维持编队。
面向视场受限的视觉无人机集群,提出主动定位校正系统,通过偏航规划平衡环境观测与互观测需求;核心贡献是用卡尔曼滤波量化定位不确定性并分配互观测任务,实机可将定位漂移最高降低 65%,在无 GPS 环境稳定维持编队。
STD-Trees#
轨迹优化
对多旋翼动力学规划采样方法收敛慢的问题,提出时空可变形树,以变形单元优化轨迹树的空间状态与时间时长;核心贡献是提出四种变形模式,时空变形相较仅空间变形显著加速收敛、提升轨迹质量,可兼容多种 RRT 类规划器。
Radar Cross-Modal Diffusion Model#
跨模态扩散模型
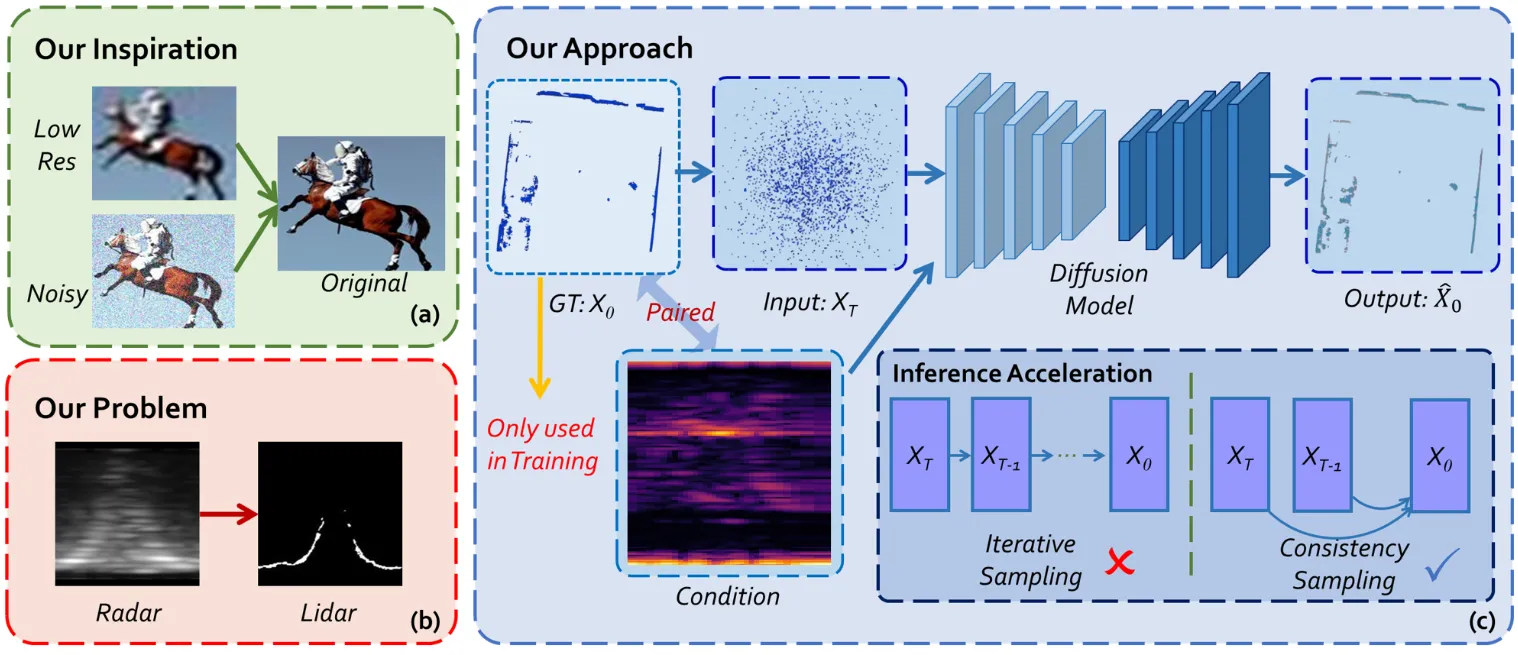 对毫米波雷达点云稀疏噪声大的问题,提出跨模态扩散模型,以激光雷达为监督生成稠密雷达点云,并结合一致性模型实现一步快速推理;核心贡献是首次将扩散模型用于无人机雷达感知,嵌入式平台可实时运行,点云质量与泛化性超越现有方法。
对毫米波雷达点云稀疏噪声大的问题,提出跨模态扩散模型,以激光雷达为监督生成稠密雷达点云,并结合一致性模型实现一步快速推理;核心贡献是首次将扩散模型用于无人机雷达感知,嵌入式平台可实时运行,点云质量与泛化性超越现有方法。